詳解自動駕駛的五大域控制器技術及其在通信與自動控制中的研究
隨著汽車智能化浪潮的推進,自動駕駛技術正從概念逐步走向現實。在這一進程中,域控制器(Domain Controller) 扮演著“車載超級計算機”的關鍵角色,它通過整合、處理來自車輛各傳感器的海量數據,并執行復雜的決策與控制算法,是實現高度自動駕駛(L3及以上)的核心硬件基礎。傳統分布式電子電氣架構已無法滿足高階自動駕駛對算力、帶寬和安全性的苛刻要求,集中化的域控制器架構應運而生。本文將深入詳解構成自動駕駛系統的五大核心域控制器技術,并探討其背后的通信與自動控制關鍵技術研究。
一、自動駕駛五大域控制器技術詳解
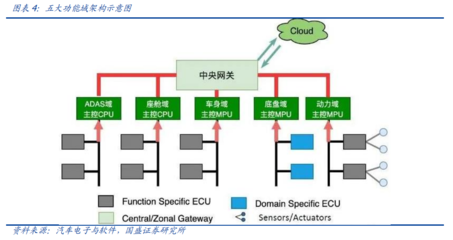
域控制器本質上是為特定功能域服務的、高性能的集中化計算單元。在自動駕駛領域,通常可以劃分為以下五大核心域:
1. 自動駕駛域控制器(ADCU - Autonomous Driving Control Unit)
- 核心職能:這是自動駕駛的“大腦”,負責最高層的環境感知、融合定位、決策規劃與控制執行。它集成高算力AI芯片(如英偉達Orin、華為MDC、地平線征程等),運行復雜的神經網絡模型,處理攝像頭、激光雷達、毫米波雷達等多源異構傳感器數據,實時構建車輛周圍環境的精準模型,并規劃出安全、舒適、高效的行駛軌跡。
- 技術挑戰:超高算力需求(TOPS級別)、低延遲、高可靠性與功能安全(ASIL-D級)。
2. 智能座艙域控制器(CDCU - Cockpit Domain Control Unit)
- 核心職能:負責駕乘人員的交互體驗,整合儀表盤、中控屏、抬頭顯示(HUD)、流媒體后視鏡、語音助手、人臉識別、娛樂系統等。隨著自動駕駛級別的提升,座艙域需要與自動駕駛域緊密協同,例如在自動駕駛接管時提供清晰的人機交互接口。
- 技術挑戰:多屏異構顯示驅動、高性能圖形處理、自然流暢的多模態交互、與自動駕駛域的安全信息共享。
3. 車身域控制器(BDCU - Body Domain Control Unit)
- 核心職能:傳統上負責車身舒適與便利功能,如門窗、燈光、雨刮、空調、PEPS(無鑰匙進入啟動)等控制。在智能汽車中,其角色正從簡單的控制向網關和能源管理拓展,并需為自動駕駛系統提供穩定的車身狀態信息(如車門狀態)。
- 技術挑戰:高集成度以替代大量分散的ECU、可靠的網絡網關功能、低功耗管理。
4. 動力域控制器(PDCU - Powertrain Domain Control Unit)
- 核心職能:在電動車中尤為關鍵,負責三電系統(電池、電機、電控)的協調管理與優化控制。對于自動駕駛而言,動力域需要精確、快速、平滑地執行自動駕駛域發出的加速、制動、轉向等控制指令,是實現“線控底盤”的關鍵一環。
- 技術挑戰:高實時性、高精度控制、與自動駕駛域的協同響應、功能安全。
5. 底盤域控制器(VDCU - Vehicle Dynamics Domain Control Unit)
- 核心職能:負責車輛橫向、縱向及垂向的動態控制,集成傳統的ESC(電子穩定控制系統)、EPS(電動助力轉向)、ABS(防抱死系統)等功能,并向線控轉向、線控制動演進。它是自動駕駛執行層的最終“手腳”,必須毫秒不差地執行規劃軌跡。
- 技術挑戰:極高的實時性與可靠性(ASIL-D級)、冗余設計、與動力域的協同控制。
二、通信與自動控制關鍵技術研究
五大域控制器并非孤立運作,它們通過高速、可靠、安全的車載網絡緊密連接,形成一個協同工作的整體系統。這背后涉及兩大核心研究方向:
1. 車載網絡通信技術
- 高速骨干網:域間通信需要極高的帶寬。以太網(特別是車載以太網,如1000BASE-T1/10BASE-T1S) 正成為域控制器互聯的主流骨干網,替代傳統的CAN/CAN FD,以滿足傳感器數據流、高清地圖更新、軟件OTA等大數據量傳輸需求。
- 實時性與確定性:自動駕駛控制指令的傳輸要求極低的延遲和抖動。時間敏感網絡(TSN) 技術通過在以太網上提供時間同步、低延遲和流量調度,為自動駕駛的實時控制提供通信保障,是當前研究熱點。
- 安全與可靠性:通信安全是功能安全的基石。研究包括車載防火墻、入侵檢測系統、安全協議(如MACsec) 以及通信冗余設計(如雙環網),確保網絡在部分故障或遭受攻擊時仍能維持關鍵功能。
2. 跨域協同與自動控制技術
- 系統架構與中間件:如何讓五大域高效、解耦地協同工作是核心課題。面向服務的架構(SOA) 和先進的車載中間件(如ROS 2、AUTOSAR Adaptive)被廣泛應用。它們提供標準的服務接口和通信機制,使得感知、決策、控制等軟件功能能夠靈活部署在不同域控制器上,并實現動態通信。
- 控制算法集成與優化:自動駕駛的最終表現依賴于各域控制算法的無縫集成。研究重點包括:
- 縱向與橫向協同控制:將動力域(驅動/制動)與底盤域(轉向)的控制深度耦合,實現平滑精準的軌跡跟蹤。
- 預測控制與容錯控制:基于車輛動力學模型和交通環境預測,設計模型預測控制器(MPC),并在傳感器或執行器部分失效時啟動容錯控制策略,確保安全降級。
- 車-云-路協同控制:域控制器不僅處理車端信息,還需通過5G/V2X通信與云端(高精地圖、交通調度)及路側設備(信號燈、路況)交互,實現更優的全局決策與控制,這是邁向高階自動駕駛的關鍵。
結論
自動駕駛五大域控制器技術構成了車輛智能化的硬件與功能核心,而高速可靠的通信網絡與先進的跨域協同控制算法則是串聯起這些“智能器官”的“神經網絡”與“中樞指令”。未來的發展趨勢將是進一步集中化,從“域融合”走向“中央計算平臺+區域控制器”的架構,以進一步降低成本、提升算力利用效率和系統集成度。通信技術的演進(如TSN的成熟應用)與控制理論的創新(如基于深度學習的控制、群體智能控制),將持續推動自動駕駛系統向更安全、更高效、更舒適的方向邁進。對這一技術矩陣的深入研發與整合,是贏得自動駕駛未來競爭的關鍵所在。
如若轉載,請注明出處:http://www.jikei.com.cn/product/75.html
更新時間:2026-03-20 09:59:34